聯系電話:17795608720
固定電話:029-81124223


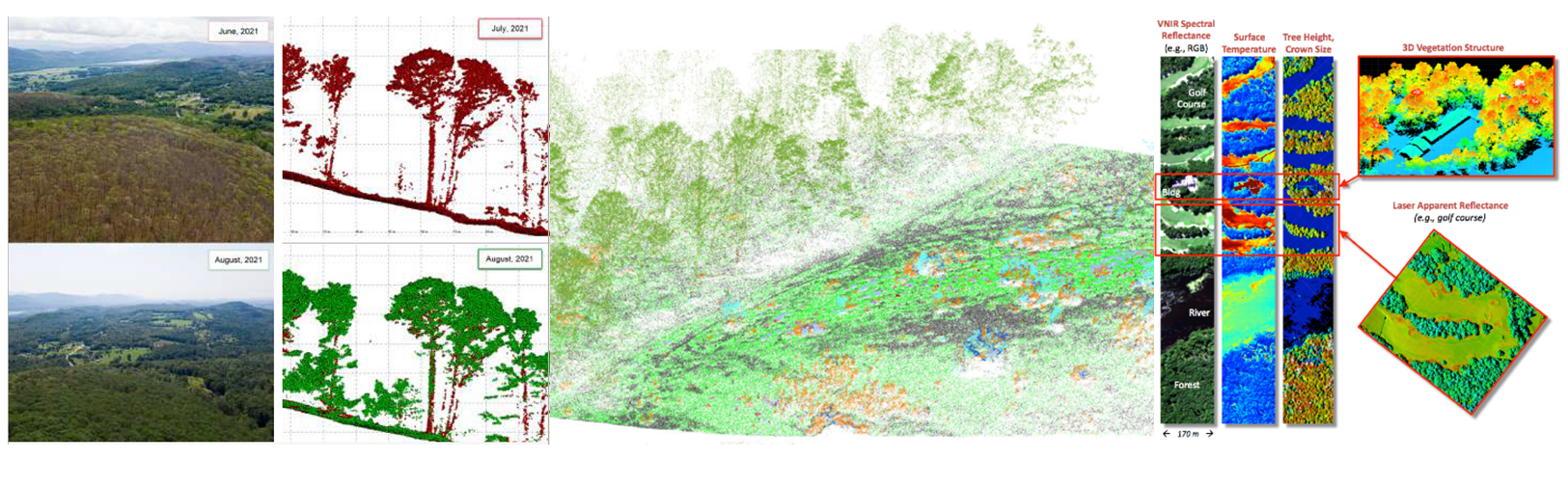
易科泰光譜成像與無人機遙感技術研究中心最新推出Ecodrone?一體式高光譜-激光雷達無人機遙感系統。該系統包括VNIR/NIR波段高光譜成像儀和激光雷達掃描儀,一次飛行可同時獲取目標圖譜信息及三維點云數據,應用于大范圍、多維度的森林遙感研究、林木表型分析、植被資源調查、生態環境研究、林業測繪等領域。

該系統基于高光譜成像及激光雷達傳感器,在獲取葉片或冠層尺度的高分辨率光譜反射數據的同時,還能夠直接獲取高精度的植被三維結構信息和生境結構信息,對森林冠層及結構層面進行大范圍快速原位監測、林木三維表型測量、森林物種多樣性研究、植被生物及非生物脅迫分析、環境及生態系統動態變化研究等具有重要意義。
性能特點:
 8旋翼專業無人機遙感平臺,搭載VNIR/NIR高光譜成像、機載PC及激光雷達可飛行作業20分鐘以上,有效覆蓋面積超10公頃
8旋翼專業無人機遙感平臺,搭載VNIR/NIR高光譜成像、機載PC及激光雷達可飛行作業20分鐘以上,有效覆蓋面積超10公頃
主要技術指標:
|
|
高光譜成像 |
激光雷達 |
|
|
波段范圍/波長 |
400-1000nm |
900-1700nm |
905nm |
|
光譜通道數 |
224 |
224 |
- |
|
空間像素數 |
1024像素 |
640像素 |
- |
|
地面分辨率 |
3.5cm@50m AGL |
5.5cm@50m AGL |
- |
|
探測器 |
CMOS |
InGaAs |
- |
|
FWHM |
5.5nm |
8.0nm |
- |
|
光譜采樣率 |
2.68nm |
3.5nm |
- |
|
幀頻 |
330FPS |
670FPS |
- |
|
信噪比(峰值) |
400:1 |
1200:1 |
- |
|
光圈值 |
F/1.7 |
- |
|
|
視場角 |
38° |
70.4° |
|
|
激光掃描儀 |
- |
Livox AVIA |
|
|
精確度 |
- |
2.5cm |
|
|
準確度 |
- |
3cm |
|
|
掃描頻率 |
- |
240k |
|
|
回波次數 |
- |
Up to 3 |
|
|
點云密度@50m AGL 5m/s |
- |
700pts/平方米 |
|
案例一:森林的多樣性和結構監測
巴西和美國研究人員將無人機和激光雷達、高光譜成像相結合組成“UAV-LiDAR-HSI”系統,在森林恢復監測中同時評估了兩者衍生變量的一致性和互補性、區分樹木豐富度以及預測地上生物量(AGB)的能力。
研究人員選取了由20、60或120種本地樹種構成的12個已經修復了13年的巴西大西洋熱帶森林。分析了來自激光雷達數據的冠層高度(CH)、葉面積指數 (LAI) 和林下LAI的3個結構屬性以及來自高光譜數據的18個變量,包括15個植被指數(VIs)、2個MNF分量(與光譜組成有關)和光譜角。
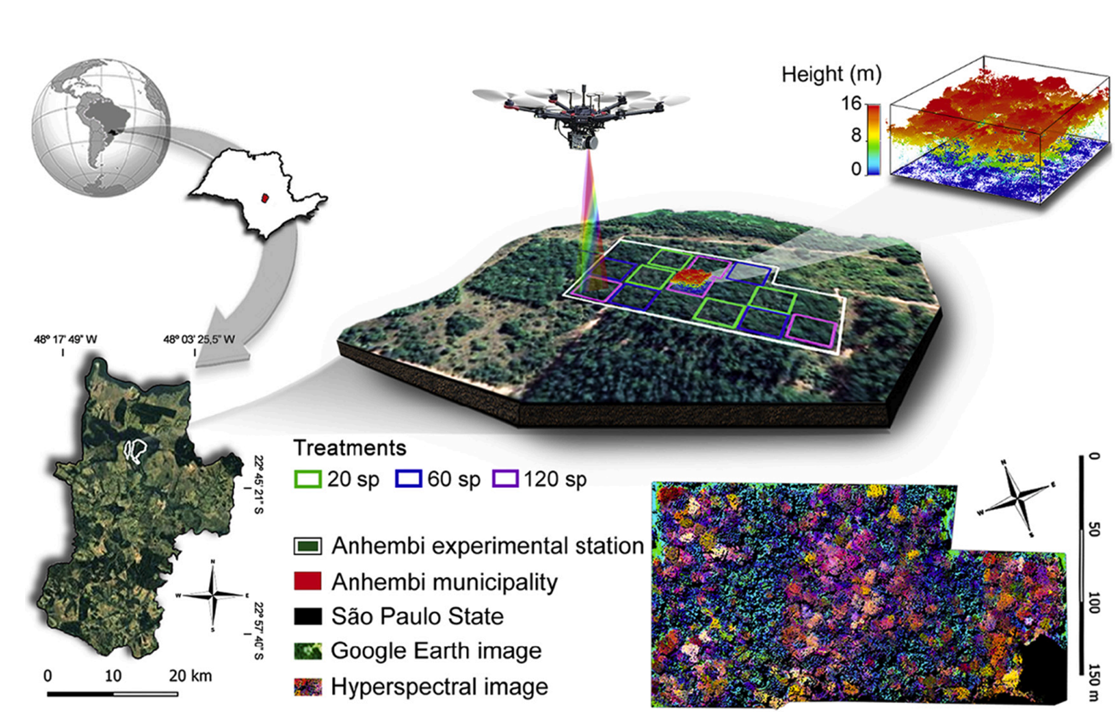
圖1-1:站點位置(左);地塊的樣本設計和激光雷達點云示例(右上); 對高光譜圖像進行著色的MNF1(右下)
研究發現,對于低LAI值區域,VIs與 LAI呈正相關,但當 LAI 大于 2m2/m2 時趨于穩定。LAI和結構VIs隨著物種豐富度的增加而增大,光譜差異性與物種豐富度顯著相關。AGB與激光雷達數據衍生變量(CH)和三個HSI衍生的VIs(RVSI、EVI、CARI)顯著相關,但在消除異常值后,最佳AGB預測變量為CH(R2=0.82,RMSE=7.62)。
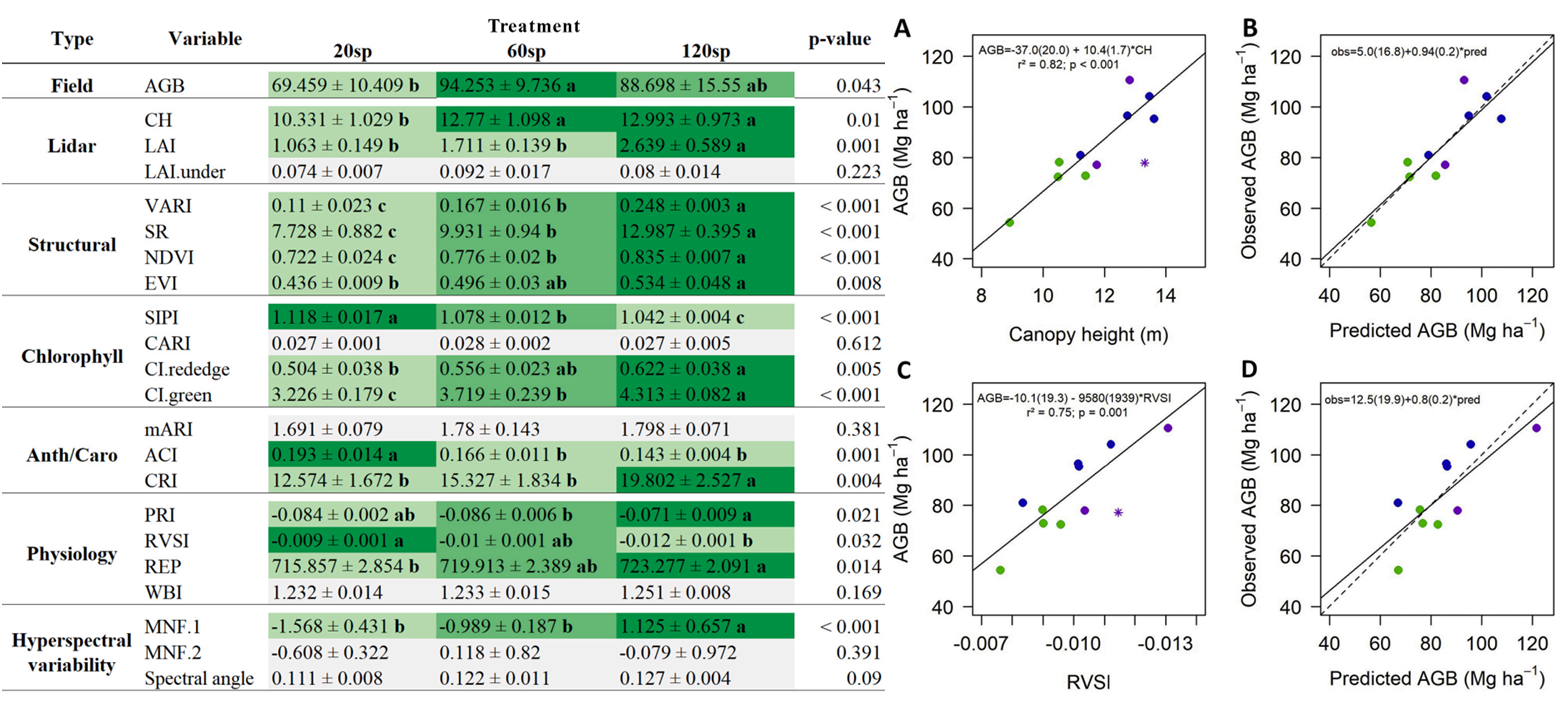
圖1-2:不同豐富度樹種的Field、Lidar、HSI變量統計分析,激光雷達和高光譜變量由像素的平均值(0.20 m分辨率)匯總,顯著變量為綠色,范圍從最低(淺綠色)到最高(深綠色)值(左);
A:激光雷達衍生的冠層高度與地塊生物量的關系,C:高光譜衍生的 RVSI,B和D分別為CH和RVSI函數的地上生物量的留一交叉驗證(LOOCV)(右)
結果表明,基于高光譜和激光雷達技術的數據融合及信息互補手段,極大提高了評估物種生物多樣性、豐富度、結構屬性等信息的能力,并能夠極大減少野外采樣工作,顯著提高監測效率,在森林植被恢復監測及評估方面具有良好的研究價值和應用前景。
案例二:高度多樣化的樹種分類
無人機遙感技術是一種在清查森林資源和繪制樹種圖等應用領域十分有效的方法,該方法建立的可靠的樹種測繪系統對資源管理、生物多樣性評估、生態系統服務功能評估和生態保護具有重要意義。
巴西和意大利研究人員使用無人機遙感技術對位于巴西南部圣卡塔琳娜州庫里蒂巴諾斯市約25公頃林區內的12種主要樹種進行分類識別,獲取了目標的VNIR波段光譜數據、三維點云(PPC)、冠層高度模型(CHM)以及由高光譜數據提取的其它特征(植被指數VI、MNF等)信息,并用SVM進行分類。
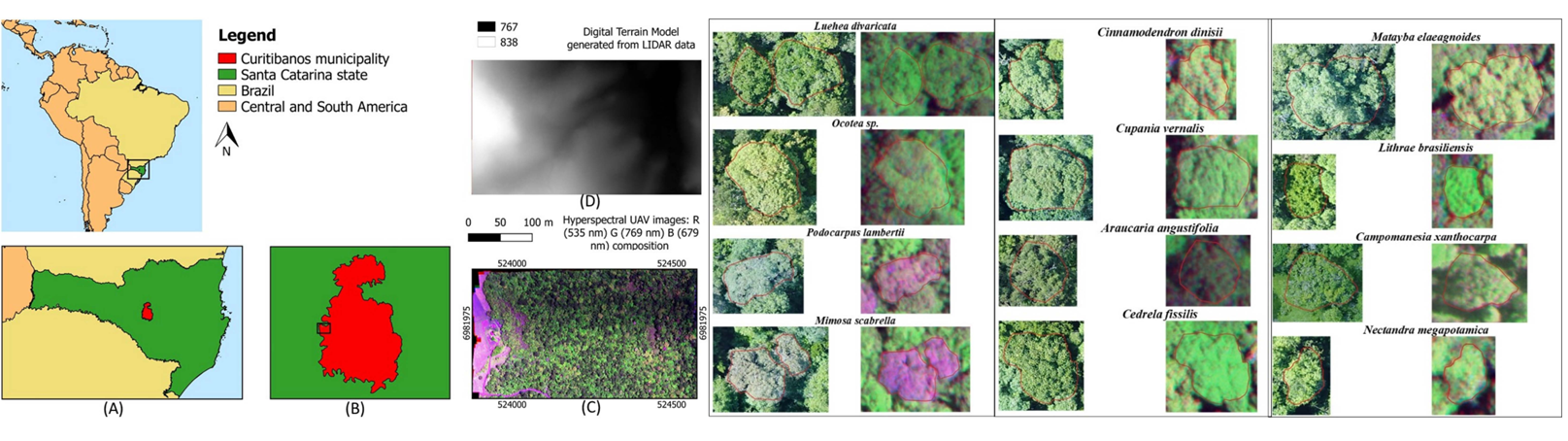
圖2-1:(A)(B):研究區域;(C):高光譜圖像R (535 nm) G (769 nm) B (679 nm);(D)數字地形型(左);
不同樹種的高光譜圖像(右)
結果顯示,單獨使用 VNIR 高光譜波段的總體準確度(OA)達到了57%(Kappa系數為0.53)。PPC特征有助于區分某些特定的樹種類別,將PPC添加到VNIR高光譜波段后,OA 增加了11%。而結合了VNIR波段、PPC特征、CHM和 VI的數據集則獲得了最好的結果,OA高達72.4%,Kappa系數為0.70。
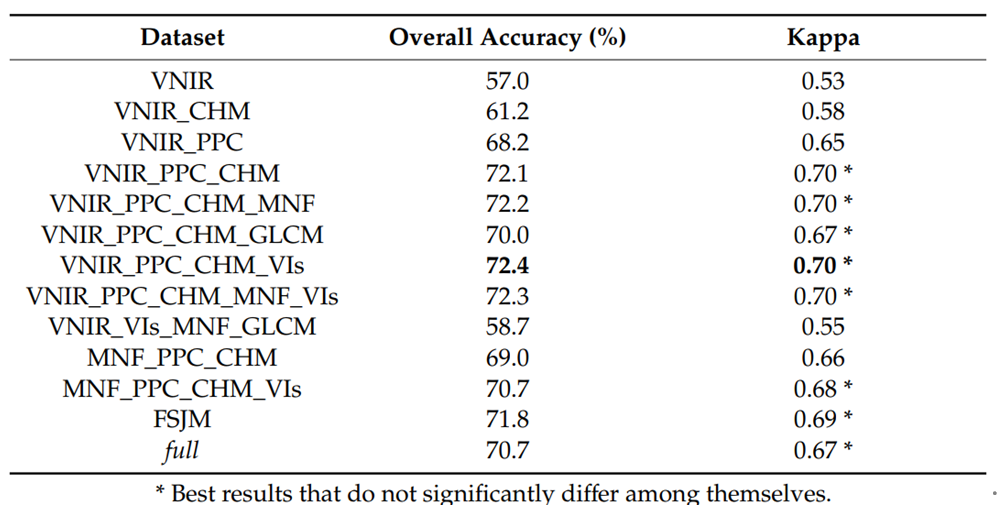
圖2-2:不同數據集的總體準確率和 Kappa系數
另外,VNIR_CHM_PPC_VIs數據集的最終分類圖,也顯示出了該地區的演替階段梯度,例如,在西側,植被較低,由Mimosa scabrella等先鋒樹種組成。在東側,植被變得更高更密,由后期次生和受氣候影響的樹種組成,如Ocotea屬和Campomanesia xanthocarpa。而Araucaria angustifolia樹種在整個研究區普遍存在,因為它具有先鋒和晚期演替特征。
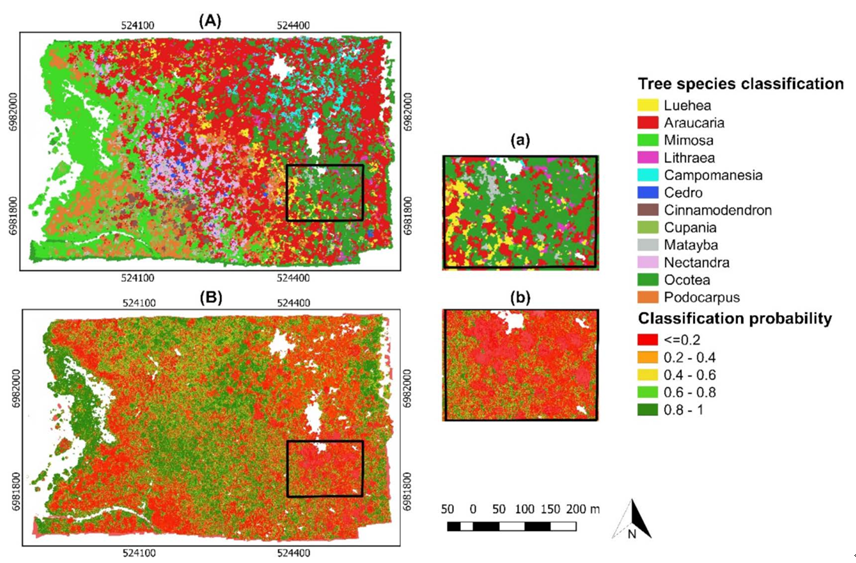
圖2-3:(A)VNIR_CHM_PPC_VI數據集的分類;(B)概率圖;(a,b)顯示歸類為Ocotea sp的高不確定性區域
研究表明,基于VNIR波段高光譜數據和PPC特征建立的分析模型,在熱帶森林樹種分類中具有良好的應用潛力。
易科泰生態技術公司致力于生態-農業-健康研究發展與創新應用,為森林遙感研究、林木表型分析、植被資源調查、生態環境研究、林業測繪等領域提供無人機及近地遙感全面技術方案。
參考文獻:
[1] Sothe C, Dalponte M, Almeida C M, et al. Tree species classification in a highly diverse subtropical forest integrating UAV-based photogrammetric point cloud and hyperspectral data[J]. Remote Sensing, 2019, 11(11): 1338.
[2] De Almeida D R A, Broadbent E N, Ferreira M P, et al. Monitoring restored tropical forest diversity and structure through UAV-borne hyperspectral and lidar fusion[J]. Remote Sensing of Environment, 2021, 264: 112582.



全部評論